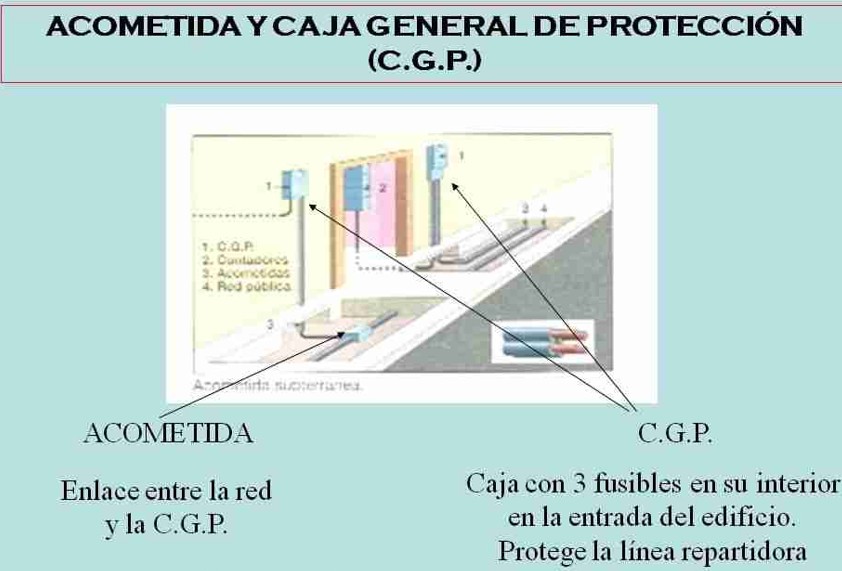
Nada más llegar al edificio, donde está situada la vivienda, nos encontramos con la acometida.
Este punto es el punto que une la instalación del distribuidor de energía (por ejemplo Iberdrola) con la instalación del edificio. De la acometida (que pertenece a la distribuidora) pasamos a la llamada Caja General de Protección del Edificio.
Simplemente es una caja con 3 Fusibles para proteger la instalación de todo el edificio en caso de sobrecargas eléctricas.
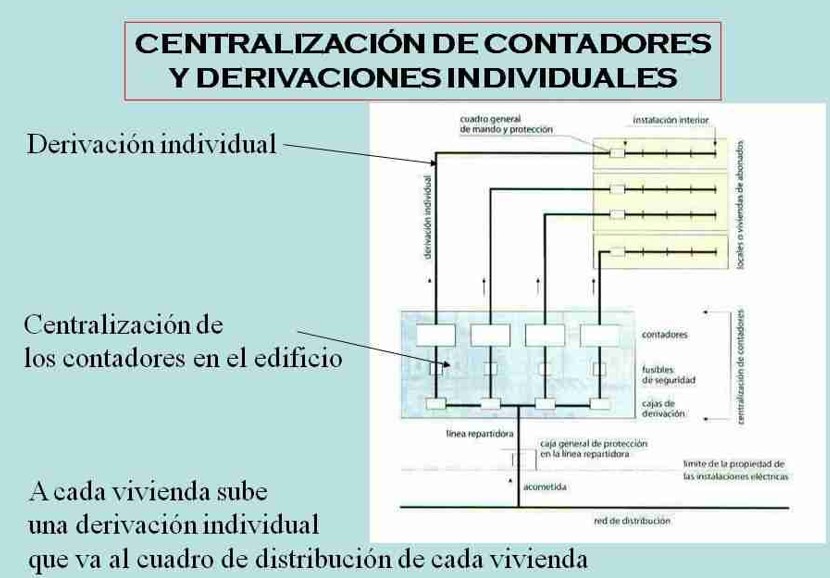
Ahora entramos dentro del edificio y nos encontramos con la Linea General de Alimentación (LGA) o también llamada línea repartidora. Esta es la línea que une la Caja General de Protección con la Centralización de los Contadores.
De cada contador, la instalación va a subir a cada vivienda particular por la derivación individual. Habrá tantas derivaciones individuales como número de viviendas en el edificio.
Veamos el esquema completo de la instalación del edificio.
El multímetro es un aparato para trabajos en electrónica, es decir aquellos trabajos que se necesitan realizar en componentes electrónico.
Un multímetro es una herramienta de comprobación, que suele estar presente en todos los talleres de reparaciones electrónicas.
Con esta herramienta de diagnóstico puedes realizar las siguientes medidas, dependiendo de las características del multímetro:
- Medida de continuidad.
- Medida de resistencias.
- Medidas de tensión.
- Medidas de corriente.
Estas son las medidas o comprobaciones básicas que le deberíamos pedir a un multimetro. En Oscar electrónica facil empleamos el multímetro modelo 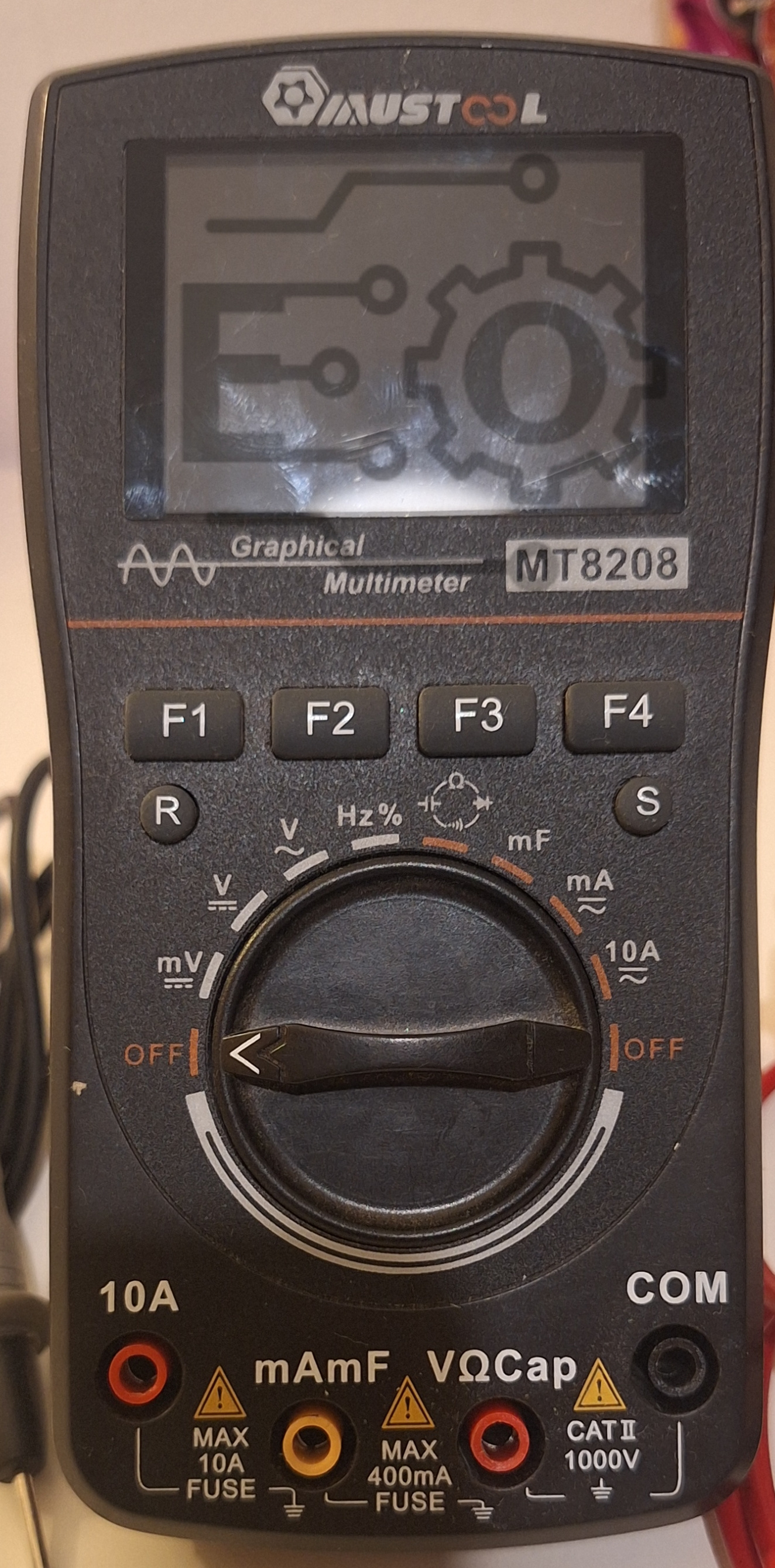 .
.
Este es un multimetro-osciloscopio, quizas un poco avanzado para un principiante de electronica pero tiene todas las características de un multimetro básico y a mayores es osciloscopio lo cual trataremos en un conocimiento mas adelante.
Lo puedes comprar a través de nuestra tienda online de Oscar electrónica facil en el enlace :
Recibe un cordial saludo.
El puente H es un circuito electrónico que permite a un motor eléctrico DC girar en ambos sentidos, avanzar y retrocerder.
Los puentes H ya vienen hechos en algunos circuitos integrados, pero también se pueden construir a partir de componentes eléctricos y/o electronicos.
¿Cómo funciona?
Un puente H se construye con 4 interruptores (mécanicos o mediante transistores). Cuandos los interruptores S1 y S4 están cerrados ( S2 y S3 abiertos ) se aplica una tensión haciendo girar el motor en un sentido. Abriendo los interruptores S1 y S4 ( cerrando S2 y S3 ), el voltaje se invierte, permitiendo el giro en sentido inverso del motor.

Un puente H no solo se usa para invertir el giro de un motor, también se puede usar para frenarlo de manera brusca, al hacer un corto entre los bornes del motor, o incluso puede usarse para permitir que el motor frene bajo su propia inercia, cuando desconectamos el motor de la fuente que lo alimenta.
básicamente se puede hacer esto tomando en cuenta la siguiente tabla.

La forma más común de hacer un puente H es usando interruptores de estado sólido ( son llamados transistores ), puesto que sus tiempos de vida y frecuencias de conmutación son mucho más altas. En convertidores de potencia es impensable usar interruptores mecánicos, dado sus especificaciones tan embonables a los requerimientos.
Además los interruptores se acompañan de diodos que permitan a las corrientes circular en sentido inverso al previsto cada vez que se conmute la tensión puesto que el motor está compuesto por bobinados que durante varios períodos de tiempo se opondrán a que la corriente varié.
Puente H con transistores TIP31
2 transistores 2N2222 que son los que conmutaran las salidas.
4 transistores TIP31 los cuales actuaran como interruptores.
4 Diodos rectificadores para crear un puente de diodos a manera que limpien la señal analógica y se pueda usar el motor de corriente directa.

Puente H con integrado L293B
En Electrónica reciclada tambien solemos utilizar el Circuito integrado L293B.
Este circuito integrado nos permite controlar dos motores en simultaneo. El motor M1 esta conectado a los Pines 3 y 6 y el motor M2 a los pines 11 y 14, como se ilustra en la figura.

El pin 16 corresponde a la alimentación propia del integrado, 5V, el Pin 16 deberá estar conectado a la tensión que alimentara los motores, puede variar en el rango de (5 a 36) V.
Es importante tener en cuenta que este integrado se alimenta con dos niveles de tensión diferente, uno corresponde a la alimentación propia de integrado, que no debe ser superior a 7V(VSS) y otra es la tensión con la que alimentaremos los motores, pudiendo en este último hacerlo con hasta 36V(VC).
Puente H con Arduino+BTS7960
En Electronica Orense solemos utilizar la convinación de un arduino con el driver BTS7960 para controlar motores de potencia, con una corriente de 43A.
Los drivers basados el BTS7960 son drivers para controlar motores de corriente continua de alta potencia, capaces de proporcionar hasta 43A de corriente a una tensión de alimentación de entre 6 a 27V.
La lógica del driver funciona con voltajes de 3.3V a 5V por lo cual es compatible con la mayoría de microprocesadores. Además, admiten realizar el control de la velocidad del motor mediante PWM con una frecuencia máxima de 25 kHz.
El BTS7960 incorpora mecanismos de protección contra cortocircuito, sobre/infra voltaje, y sobre temperatura. También dispone de dos pines que permiten medir la corriente entregada por el driver.
El BTS7960 es un buen controlador que puede gestionar una gran cantidad de motores, incluidos los de gran potencia. No obstante, recordar tener precaución a la hora de controlar elevadas cargas y corrientes eléctricas.
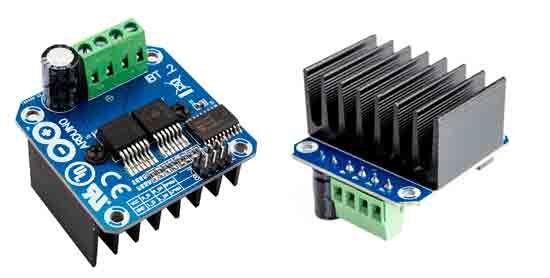
Estos drivers emplean dos circuitos integrados BTS7960, un medio puente H de la familia NovalithIC. Sumando ambos integrados se configura un puente H completo.
El BTS7960 incorpora un transistor MOSFET Canal-p para la parte alta del medio puente, y un MOSFET Canal-N para la parte baja. Además de los dos MOSFET, cada BTS7960 incorpora un IC que realiza las funcionas lógicas, diagnosis, protección, se sensado de corriente.
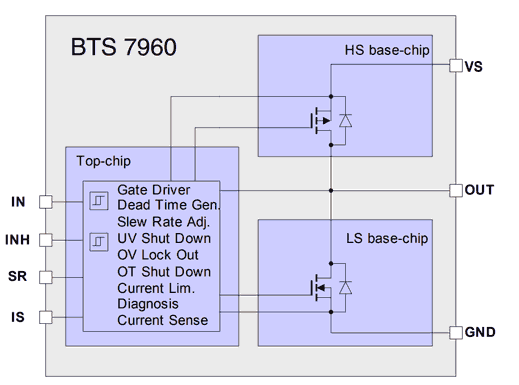
Los drivers basados en el BTS7960 incorporan un 7HC244, un buffer tri-estado de 8 canales, como protección de protección adicional para el microcontrolador.
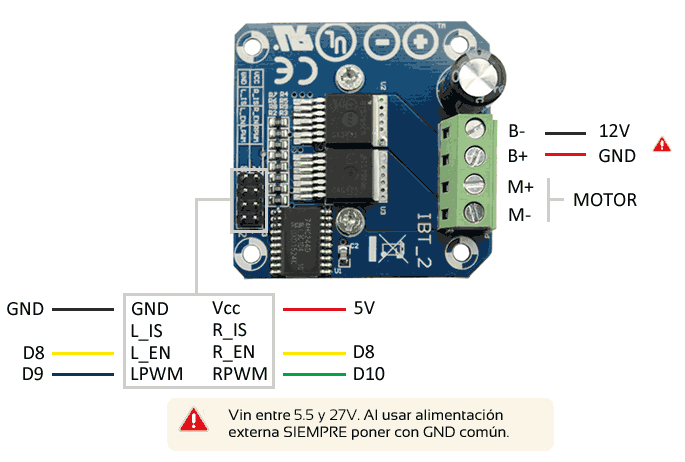
La conexión de un driver con BTS7960 es sencilla. Por un lado, conectamos la alimentación lógica del driver a 0 y 5V.
Para el control, únicamente necesitamos 3 salidas digitales. Una de ellas controlará la activación de los puentes, y las otras dos la velocidad de giro.
Finalmente, conectamos la fuente de alimentación que proporcionará corriente al motor y el motor mediante los bornes existentes en el driver.
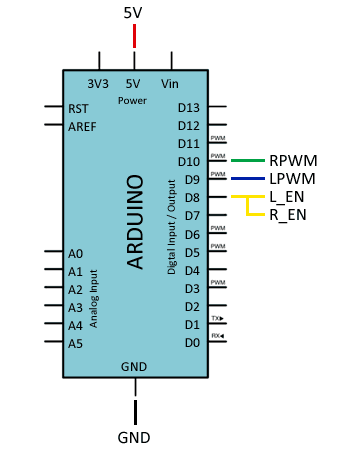
La conexión, vista desde Arduino, sería la siguiente.
El uso del driver BTS7960 en el entorno de Arduino es muy sencillo con la librería Arduino BTS7960.
El ejemplo de la librería muestra cómo controlar el driver con una señal PWM.
#include "BTS7960.h"
const uint8_t EN = 8;
const uint8_t L_PWM = 9;
const uint8_t R_PWM = 10;
BTS7960 motorController(EN, L_PWM, R_PWM);
void setup() { }
void loop() {
motorController.Enable();
for(int speed = 0 ; speed < 255; speed+=10) {
motorController.TurnLeft(speed); delay(100);
}
motorController.Stop();
for(int speed = 255 ; speed > 0; speed-=10) {
motorController.TurnLeft(speed);
delay(100);
}
motorController.Stop();
motorController.Disable();
delay(5000);
}
En Oscar electrónica facil entendemos como ingeniería inversa o retroingeniería al proceso que realizamos a un producto o artículo con el objetivo de obtener información o un diseño a partir de dicho producto o artículo, así podremos determinar cuáles son sus componentes y como interactúan entre ellos.
Normalmente a la hora de diseñar un producto se realiza el proceso de ingeniería directa, en la ingeniería directa partimos de la base de que queremos realizar algo y vamos realizando las especificaciones del objetivo al cual queremos llegar. Sin en cambio en la ingeniería inversa trabajamos en dirección opuesta, tenemos el producto y especificamos todos los procesos que realiza analizando en detalle todos sus mecanismos y funciones. En general, si el producto u otro material que fue sometido a la ingeniería inversa fue obtenido en forma apropiada, entonces el proceso es legítimo y legal. De la misma forma, pueden fabricarse y distribuirse, legalmente, los productos genéricos creados a partir de la información obtenida de la ingeniería inversa, desde hace muchos años las empresas llevan realizando ingeniería inversa para mejorar los productos de la competencia, como es el caso de algunos proyectos de software libre.
La ingeniería inversa es un método de resolución. Aplicar ingeniería inversa a algo supone profundizar en el estudio de su funcionamiento, hasta el punto de que se pueda llegar a entender, modificar y mejorar dicho modo de funcionamiento.
La ingeniería inversa no es solo aplicable al software sino que también se considera ingeniería inversa al estudio de todo tipo de elementos (por ejemplo, equipos electrónicos, microcontroladores, u objetos de cualquier clase). Se puede decir, más bien, que la ingeniería inversa antecede al nacimiento del software, tratándose de una posibilidad a disposición de las empresas para la producción de bienes mediante copiado desde el mismo surgimiento de la ingeniería.
La ingeniería inversa nace en el transcurso de la Segunda Guerra Mundial, cuando los ejércitos enemigos incautaban insumos de guerra como aviones u otra maquinaria de guerra para mejorar las suyas mediante un exhaustivo análisis.
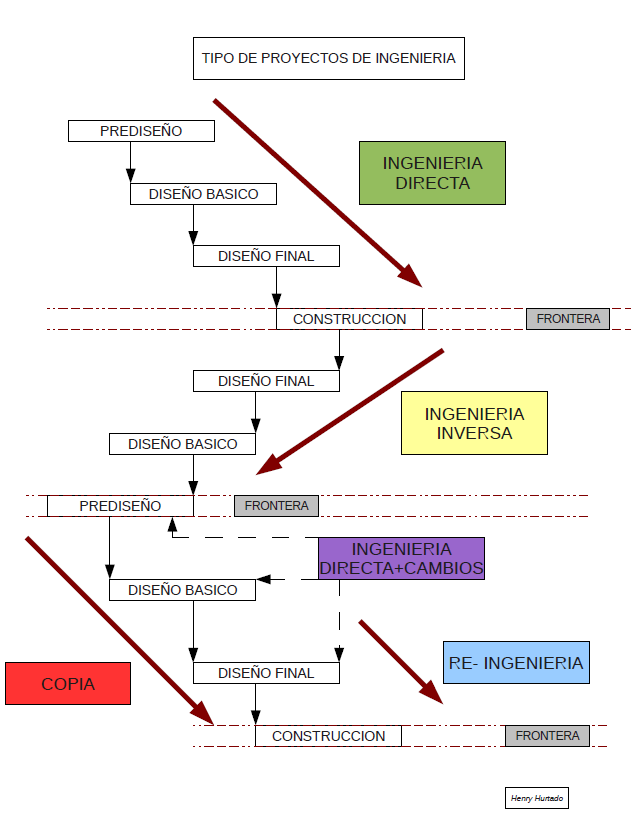
La siguiente figura muestra los procesos que sigue la ingeniería directa; si se sigue ese camino hacia "atrás" (o de manera inversa), se hace ingeniería inversa, si se continúa con el camino y se plantean cambios (o mejoras), por la derecha, ese camino lleva a una reingeniería, y si no se altera el contenido de los modelos obtenidos durante los procesos de la ingeniería inversa y se sigue el camino de la izquierda, eso se llama desarrollar una copia.
Imagina que se te estropea un componente de un artículo que has comprado, y que ese componente es esencial para que funcione tú máquina, pero que la empresa que lo fabricó ya no hace recambios de ese componente. Entonces a lo que te están obligando es a que cambies tú máquina porque ya no hacen un recambio específico para ella. Mediante la ingeniería inversa se podría sustituir ese componente de la máquina por otro que realizase la misma función dentro de la máquina, con ello estás aplicando el sistema de las 7R (reutiliza, repara, rediseña, recicla, reduce, recupera, renueva), filosofía que llevamos a cabo en Oscar Electrónica Facil.
Cómo funciona un bombeo solar
El funcionamiento de un bombeo solar fotovoltaico no se diferencia mucho de un bombeo convencional. Ambos sistemas están ideados para extraer agua a través de una bomba hidráulica, que luego se utiliza para diversos usos (riego, abrevaderos para ganado, agua potable, etc.), pero se diferencian en cómo alimentan el sistema. En el caso del bombeo solar:
 Las placas solares recogen la radiación solar y la transforman en electricidad de corriente continua.
Las placas solares recogen la radiación solar y la transforman en electricidad de corriente continua.- El controlador (o variador de frecuencia, en caso de bombas de agua convencionales) transforma la energía de corriente continua en corriente alterna para hacer funcionar la bomba.
- Con esta energía limpia y renovable, la bomba de agua se pone en marcha y comienza a mover el caudal de agua hacia donde quieras.
- Dado que el funcionamiento de la bomba de agua depende de la energía solar, el caudal podrá variar según la electricidad que generen tus paneles solares: durante las horas centrales del día los paneles estarán funcionando a máximo rendimiento, ofreciendo el mayor caudal. Cuando cae la tarde y se reduce la radiación solar, el caudal se reducirá. Y, al llegar la noche, la bomba de agua se detendrá, al no haber luz solar.
- Si quieres tener agua cuando no haya luz solar, la solución recomendada es disponer de un depósito para almacenar el excedente de agua que extraigas durante las horas centrales del día. De esta forma, si colocas el depósito en un nivel más elevado, podrás utilizar la gravedad para llevar el agua donde quieras.